HRI In Motion - Robot Remote Control
I designed an Anroid App for construction site delievery robot's remote control to tacle workers' needs of easy robot control onsite.
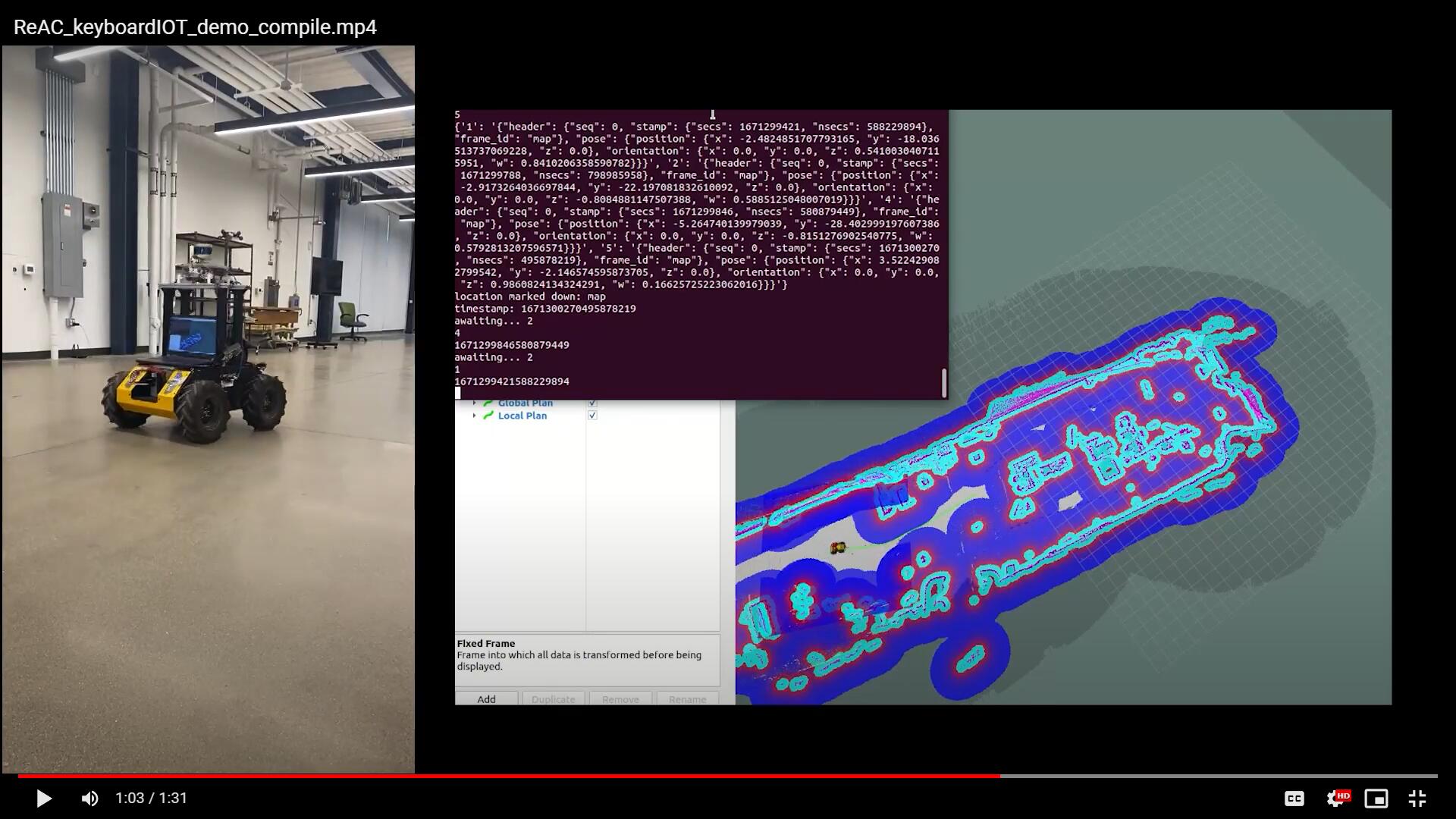
Demo
Android App Demo
Demonstration of the Android app interface controlling the Husky robot through Bluetooth communication for construction site navigation and task management.
The Challenge
The Problem
Construction site workers need an efficient way to command assistive robots for material delivery and tool transport, but existing interfaces are too complex for on-site use.
Our Approach
We designed a dual-interface Bluetooth controlling system with both physical IOT keyboard devices and an Android app, using Arduino as middleware to ensure robust communication.
Research & Insights
System Architecture
The system uses single digit instructions with recurring frequency to minimize latency. All information storing, conversion and changes happen inside ROS to ensure robust Bluetooth communication between remote devices and the robot’s main PC.
Dual Interfaces
Android App + IOT Keyboard
The app is intuitive - I can control the robot and save locations without any training. It’s exactly what we need on site.
Defining the Problem
How might we...
help construction site workers easily control assistive robots, so they can complete tasks efficiently without technical training?
Hardware System
- • Heltec WiFi LoRa (ESP)32 board
- • 100+ meter communication range
- • Arduino middleware integration
User Flow Phases
- • Phase I: Location Recording
- • Phase II: Working Mode
- • Dynamic path planning
Key Locations
- • Charging stations
- • Tool & material stations
- • Customized work zones
Reflection
✅ What Worked
- • Strong research foundation guided all decisions
- • Iterative testing caught issues early
- • Cross-functional collaboration was key
💡 Learnings
- • Balance technical constraints with user needs
- • Stakeholder alignment is crucial from day one
- • Value of rapid prototyping can’t be overstated